https://doi.org/10.35381/i.p.v8i14.5009
Sistema de bipedestación en una silla de ruedas con recursos para control y monitoreo remoto
Standing system in a wheelchair with resources for remote control and monitoring
Jeny Maribel Sangucho-Saquinga
jenymaribel16@hotmail.com
Red de Investigación Koinonía, Ambato, Tungurahua
Ecuador
https://orcid.org/0009-0003-7968-5865
Eduardo Francisco García-Cabezas
Escuela Superior Politécnica de Chimborazo. Grupo de Investigación & vinculación "AUTOPRO", Riobamba, Chimborazo
Ecuador
https://orcid.org/0000-0002-3547-472X
Julio César Moyano-Alulema
j_moyano@espoch.edu.ec
Escuela Superior Politécnica de Chimborazo. Grupo de Investigación & vinculación "AUTOPRO", Riobamba, Chimborazo
Ecuador
https://orcid.org/0000-0001-6672-9409
Juan Carlos Cayán-Martínez
jcayan@espoch.edu.ec
Escuela Superior Politécnica de Chimborazo. Grupo de Investigación & vinculación "AUTOPRO", Riobamba, Chimborazo
Ecuador
https://orcid.org/0000-0001-9573-3706
Revisado: 03 de octubre 2025
Aprobado: 15 de noviembre 2025
Publicado: 01 de enero 2026
RESUMEN
Las personas con problemas de movilidad que no cuentan con sillas de ruedas con sistema de bipedestación tienen limitada su autonomía. El objetivo fue prototipar una silla de ruedas con bipedestación incorporando recursos para control y monitoreo remoto usando IoT. La metodología fue basado en estudios del arte y caracterización de requerimientos mediante investigación exploratoria. Se diseñó un modelo CAD validado en SolidWorks y mediante metodología estructural. Se construyeron los sistemas mecánicos y electrónicos, y se implementó la interfaz IoT para el monitoreo remoto. El prototipo resultante mostró impacto relevante al integrar un sistema automático de bipedestación electrónico, alcanzando un factor de seguridad de 1,98 adecuado para personas de hasta 70 kg y 160 cm. Se registró un ciclo estable de 40 segundos, ángulos de 163° a 169°, consumo energético de 196,8 W y eficacia del 100 % en la publicación de datos IoT.
Descriptores: bipedestación; control automático; internet de las cosas; prototipo; silla de ruedas. (Tesauro UNESCO).
ABSTRACT
People with mobility impairments who lack wheelchairs equipped with standing systems face limitations in their autonomy. This work aimed to prototype a wheelchair with a standing system, incorporating resources for remote control and monitoring using IoT. The methodology followed a deductive approach, beginning with a state-of-the-art review and requirement characterization through exploratory research. A CAD model was designed and validated in SolidWorks, and, following a structural methodology, software and hardware resources were selected. Mechanical and electronic systems were then built, and the IoT interface was implemented for remote monitoring. The resulting prototype demonstrated significant impact by integrating an automatic electronic standing system, achieving a minimum safety factor of 1.98, valid for users up to 70 kg and 160 cm. A stable 40-second standing cycle was recorded, with angles of 163° to 169°, energy consumption of 196.8 W, and 100 % efficiency in IoT data publication.
Descriptors: standing system; automatic control; internet of things (IoT); prototype; wheelchair. (UNESCO Thesaurus).
INTRODUCCIÓN
Hoy en día, las lesiones en el cuerpo humano suceden con elevada probabilidad debido a diversos motivos, de este problema parte la discapacidad física, la cual constituye uno de los principales inconvenientes para las personas. Por esta razón, la sociedad, en conjunto con el desarrollo de la tecnología y las áreas de conocimiento, se ve en la ardua necesidad de producir instrumentos y herramientas que ayuden a este grupo de personas en su movilidad y en los diversos tratamientos que sus lesiones requieran. En Ecuador, según el Consejo Nacional para la Igualdad de Discapacidades (CONADIS), en el 2017 existían 418 001 personas con discapacidad; de las cuales, el 54,7 % presentaba un grado de discapacidad grave o muy grave, y tan solo el 20,8 % se encontraba laboralmente activo (CONADIS, 2022). Es así como una silla de ruedas con un sistema de bipedestación constituye una alternativa de solución viable para aquellas personas que padecen de algún tipo de discapacidad en sus extremidades inferiores.
La falta de continuidad de trabajos de investigación (Merai et al., 2022; Rodríguez Arias & Rodríguez Ribón, 2025) e inexistencia de incentivos estatales para el desarrollo de este tipo de silla bipedestadora ha provocado que se fabriquen únicamente bajo pedido, de acuerdo a las exigencias del usuario, sin considerar el desarrollo de una producción en masa. Esto contribuye a la dependencia de importación de estos equipos. La existencia de un número reducido de modelos en el mercado ecuatoriano (Rodríguez Arias & Rodríguez Ribón, 2025) dificulta el acceso de los usuarios que necesitan terapias de rehabilitación o dispositivos para movilizarse en el desarrollo de sus actividades, provocando que su salud se vea agravada y su condición de discapacidad se perjudique aún más con el tiempo. Esta situación repercute en su estado emocional, al no tener la capacidad de desarrollar sus actividades cotidianas de manera autónoma (Daniel et al., 2022; Field et al., 2025).
Por esta razón, surge la necesidad de desarrollar, diseñar y simular un mecanismo de estructura bipedestadora que permita ajustar la configuración morfológica y postura de una persona conforme a principios ergonómicos, lo que contribuye a facilitar la realización temporal de ejercicios que benefician a diferentes sistemas del cuerpo humano (Gohlke & Kenyon, 2024; Jasso et al., 2023; Kenyon et al., 2024; Örücü Atar et al., 2025; Taoheed et al., 2025).
La investigación tuvo como objetivo prototipar un sistema de bipedestación en una silla de ruedas con la inserción de recursos para control y monitoreo remoto usando IoT.
MÉTODO
El abordaje metodológico de la investigación se llevó a cabo a partir de la definición de ocho elementos fundamentales, los cuales se describen a continuación.
I. Parámetros de diseño del sistema
Se tuvieron en cuenta aspectos de relevancia en la selección de materiales para la estructura y para los componentes tecnológicos utilizados en el control y monitoreo remoto mediante tecnología IoT en aras de garantizar un diseño confortable y estético.
A. Requerimientos del prototipo
El prototipo parte de una silla de ruedas estándar, con un diseño estético adecuado y ergonomía establecida para personas con estatura entre 140 y 160 cm, con un peso hasta 70 kg. Tendrá implementado un sistema electromecánico que facilitará el desplazamiento de la silla de forma autónoma, mediante el uso de un mando de control. El control de la silla se implementará mediante una tarjeta de desarrollo o módulo de procesamiento compatible con diversas tecnologías, sensores que permitan monitorear su estado durante su operación, actuadores dimensionados según la carga de trabajo y un sistema energético recargable que garantice la autonomía de funcionamiento. Además, para el monitoreo remoto usando IoT, se debe utilizar una plataforma que permita: la creación de una cuenta gratuita, desarrollar un dashboard con recursos gráficos de tipo indicador numérico y gráfico que permitan monitorear el estado de los sensores en tiempo real, y el acceso remoto a la información almacenada en dicha plataforma (conexión a internet mediante Wi-Fi).
B. Arquitectura del prototipo
La arquitectura del prototipo consta de tres etapas: energización, adquisición y control, y monitoreo IoT. La energización es la fase central dado que suministra la energía necesaria para el funcionamiento de los componentes de las demás etapas. Se consideró un estándar de voltaje de 24 VDC como fuente primaria, empleando reguladores para reducir este nivel a 12 o 5 VDC, y se dimensionó la capacidad de voltaje y corriente de las baterías a ser empleadas a partir del tiempo de autonomía de funcionamiento energético definido para el prototipo. En la etapa de adquisición y control se adquieren las señales de los sensores por parte de una tarjeta de interfaz y se controlan los motores del mecanismo para generar los movimientos de la silla. Los actuadores empleados deben garantizar la movilidad y elevación de la silla para un usuario con un peso superior a los 70 kg. En la etapa de monitoreo IoT se efectúa el envío de la información hacia una plataforma alojada en internet, a través de un módulo de procesamiento, para monitorear visualmente las condiciones operacionales del prototipo (dashboard de la página) mediante una pantalla HMI.
II. Diseño CAD estructural del prototipo
Para el diseño se utiliza una silla de ruedas de 18ʺ Estándar KD Premium, modelo LR8400-KD. En la Figura 1a se detallan los elementos del sistema de bipedestación analizados mediante el modelado en el software SolidWorks. El análisis permitió determinar la dimensión final del espaldar (118 mm), que define la posición idónea para el prototipado, y posibilita que la silla de ruedas pueda efectuar la bipedestación y contar con dos estados de uso (Figura 1b).
En la Figura 1c se muestra el sistema electromecánico motorizado de las ruedas, resultante de cambiar la manzana de la rueda por una de bicicleta que permitió adaptar el eje al mecanismo de transmisión por cadena.
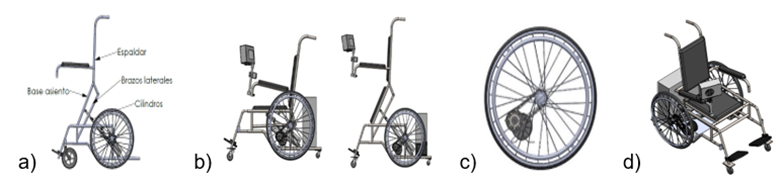
Figura 1. Sistemas componentes del prototipo diseñado.
Elaboración: Los autores.
Además, se realizó el alargamiento del eje principal hasta 100 mm, permitiendo el acoplamiento a un cilindro dentado y a la manzana mediante la fijación con prisioneros, y se adaptó un motor con transmisión en la base de la silla. Finalmente, se colocó una base metálica en la parte trasera de la silla donde se instalaron los cilindros del mecanismo de bipedestación y los componentes para el control y monitoreo, y se efectuó el ensamble global de la silla (Figura 1d).
III. Diseño de los sistemas de transmisión
A. Diseño del sistema de bipedestación
De acuerdo con las propiedades físicas de la estructura de la silla de ruedas (19,3 kg), el peso de una persona promedio (80 kg, superior en 10 kg al peso proyectado) y demás componentes del prototipo, se estimó un peso total del prototipo de 149,3 kg. Para calcular la fuerza necesaria de los actuadores tipo cilindros encargados de efectuar el movimiento del sistema de bipedestación se utilizó la ecuación 1, donde Fcy es la fuerza del cilindro en el eje, Pp es el peso de la persona más el de la estructura del asiento y espaldar (peso teórico que debe alzar el cilindro), θ es el ángulo de inclinación del sistema (por diseño, 34°).
![]() [N] [1]
[N] [1]
Considerando que Pp = 127,5 kg (afectado por la acción de la fuerza de gravedad, 9,81 m/s2), se obtiene que la fuerza conjunta de los cilindros debe ser mayor a 2 236,75 N para conseguir el movimiento del mecanismo. Esto llevó a la selección de dos cilindros de 1500 N de capacidad nominal cada uno.
B. Diseño del sistema motorizado de ruedas
En el prototipo se considera un motor por cada rueda trasera para garantizar el giro de la silla. A partir del cálculo de la fuerza normal en condición estática, la fuerza de rozamiento y la Fuerza para impulsar el motor; teniendo en cuenta el peso estimado del prototipo (149,3 kg), la acción de la Fuerza de gravedad (9,81 m/s2), el coeficiente de rozamiento (0,75) y la velocidad de la silla (3 km/h), se determinó que se necesitan dos motores con una Potencia estándar por motor de 350 W.
IV. Análisis estático estructural
Para el análisis estructural del prototipo se utilizó el software SolidWorks considerando los dos estados de funcionamiento de la silla de ruedas: con la persona sentada y parada. Para simplificar el modelo se eliminaron las ruedas, apoya brazos y pistones por ser puntos fijos al realizar un análisis estático. Se tomaron los valores referenciales expuestos anteriormente como pesos, una vez que se tengan los valores reales para cada componentes se realizará el análisis nuevamente con el objetivo de validar el diseño previo a su fase de construcción.
A. Caso 1: con la persona sentada
Para la situación bajo estudio en este caso se consideran la carga de las baterías y equipo electrónico (392 N) ubicados en la bandeja posterior y de la persona (784 N) en la estructura del asiento. Para el análisis se emplea un mallado de tipo estándar tetraédrico dadas las formas curvas que poseen los componentes del prototipo. Se asignan restricciones (representadas en color verde) y las cargas (en color morado).
En la Figura 2a se observa que la máxima tensión que soporta la estructura del prototipo (91,27 MPa) es inferior al límite elástico planteado por Von Mises (Cunha et al., 2024), por lo que se considera que el prototipo puede soportar correctamente las cargas descritas. Igual comportamiento se observa respecto al estudio de desplazamientos (ver Figura 2b donde se obtiene que el máximo observado fue de 0,91 mm, por lo que la estructura puede soportar las cargas de forma satisfactoria. También el diseño se considera correcto para las cargas expuestas desde el punto de vista del factor de seguridad (Figura 2c) donde el valor mínimo conseguido fue de 7,77, superior al límite establecido de 1,5.
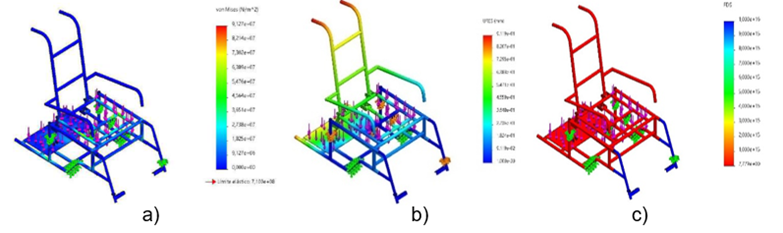
Figura 2. Análisis estático estructural con la persona sentada.
Elaboración: Los autores.
En el “Caso 2: con persona parada”, el peso de la persona recae sobre el apoyapiés y la base donde se ubican los componentes del prototipo, especialmente las fuentes de energía, cuyo tamaño y capacidad representan un factor relevante desde el punto de vista del diseño. En este caso también se obtiene un comportamiento satisfactorio: la estructura del prototipo soportó una tensión de 343 MPa, el desplazamiento máximo total fue de 1,26 mm y el factor de seguridad de 2,06. Todos los valores con un comportamiento superior al límite establecido.
V. Selección del hardware
Mediante un estudio comparativo (Lima et al., 2023; Luis García & Torres Gómez, 2024; Medina Otalvaro et al., 2022) se seleccionaron los componentes electrónicos más convenientes en cuanto a funcionalidad y disponibilidad. El hardware quedó conformado por un módulo de procesamiento Raspberry PI3, una tarjeta interfaz Arduino MEGA 2560, una pantalla TFT de cinco pulgadas, dos actuadores lineales eléctricos, dos baterías de gel como fuente de energía, dos motores DC y dos mandos de control (Joystick y Tres vías).
VI. Conexión del hardware del prototipo
Una vez seleccionados todos los componentes eléctricos y electrónicos del prototipo, se realiza en el software Fritzing la interconexión y simulación de cada componente para comprobar su funcionamiento y evitar problemas al momento de su implementación (Figura 3).
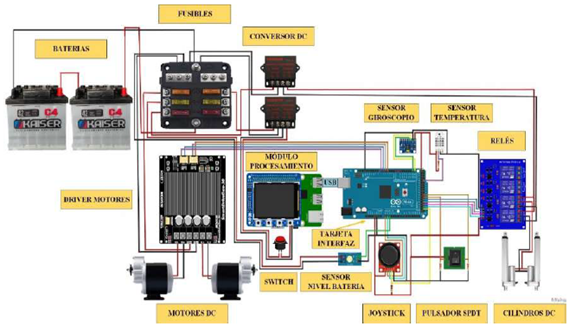
Figura 3. Esquema de conexión del prototipo.
Elaboración: Los autores.
El voltaje es suministrado por dos baterías de 12 VDC conectadas en serie. Los terminales de conexión ingresan a una caja de fusibles donde se dividen en cuatro circuitos de alimentación: el primero, con una protección de 20 A, ingresa al driver controlador de motores; el segundo, con protección de 5 A, es destinado para el módulo de control de nivel de batería; el tercero, protegido con fusible de 10 A, se conecta al conversor DC a 12 VDC, el cual suministra la energía para los cilindros DC; y el cuarto, con protección de 5 A, energiza al conversor DC de 5 VDC para alimentar al módulo de procesamiento y a la pantalla HMI del prototipo.
La conexión entre el módulo de procesamiento y la tarjeta de interfaz se desarrolla por el puerto USB, estableciendo una comunicación serial que permita la lectura de sensores y la activación de actuadores. Las conexiones de la mayoría de los componentes del prototipo son hacia la tarjeta de interfaz Arduino Mega 2560.
VII. Diseño esquemático de la placa electrónica
Una vez que cada componente ha sido asignado a un pin de entrada o salida de la tarjeta de interfaz se procede a unificar la conexión mediante una placa electrónica apoyados del software Eagle. En la Figura 4 se muestra el esquemático de la placa donde se pueden observar todos los componentes del prototipo. Se utilizan conectores de bornera doble distribuidos en los extremos de la placa para lograr una fácil conexión e identificación para actividades de mantenimiento. Para facilitar la incorporación de nuevos componentes se dejan conectores tipo espadín que permita emplear la misma placa en futuras mejoras del prototipo.
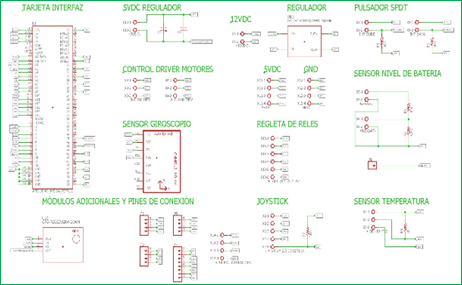
Figura 4. Esquemático de la placa electrónica.
Elaboración: Los autores.
VIII. Programación
Una vez que todos los componentes se encuentran instalados en el prototipo se procede a la programación, estableciendo las tareas a desempeñar por cada uno. La tarjeta de interfaz Arduino Mega se encargará de la lectura de los sensores, control de los actuadores y comunicación con el módulo de procesamiento; el módulo de procesamiento Raspberry será el responsable de receptar la información recopilada por la tarjeta de interfaz y subirla hacia una plataforma IoT de acceso libre. A su vez, se contará con un HMI donde se podrá realizar el control primario de la silla de ruedas, permitiendo la movilidad, la activación y desactivación de bipedestación, así como la capacidad de visualizar la plataforma IoT con los datos a ser monitoreados.
A. Interfaz gráfica del prototipo
La interfaz gráfica será desplegada en la pantalla táctil instalada, donde se visualizará la información de funcionamiento y control. La programación se desarrolló mediante la libreta Pygame de Python que permite crear objetos, animaciones y estructuras de programación para la interacción entre usuario y el prototipo. El resultado de la ejecución de las líneas de programación de la interfaz gráfica se muestra en la Figura 5.

Figura 5. Interfaz gráfica del prototipo programada.
Elaboración: Los autores.
B. Configuración de la plataforma IoT
La configuración de la plataforma IoT tiene como fin garantizar la publicación y monitoreo de la información del prototipo. Se seleccionó la plataforma Udibots (https://es.ubidots.com/) por las prestaciones que ofrece, principalmente la posibilidad de crear una cuenta gratuita para la ejecución de pruebas. Cada cuenta tiene asociado un código (APIKEY) que habilita la realización de tareas de escritura o lectura, permitiendo la conexión con la plataforma y el monitoreo de la información mediante IoT.
Se creó un nuevo dispositivo (el módulo de procesamiento Raspberry Pi 3) con un nuevo programa en el IDLE de Python, mediante el empleo de las librerías Time, Requests, Math y Random. Además, se configuró el dashboard o panel de visualización de información con elementos gráficos propios de la plataforma IoT (se seleccionan elementos gráficos propios de Udibots, a cada uno se le asocia una variable del dispositivo creado, se configura el aspecto de visualización y se nombra).
C. Programación del módulo de procesamiento
El módulo de procesamiento se encarga de la lectura de los sensores del prototipo, el control de movimiento y accionamiento de la bipedestación en dos modos: manual y por la pantalla de la interfaz gráfica. Además, realiza la publicación de los datos en la plataforma IOT Ubidots. Las acciones ejecutadas por el módulo de procesamiento se pueden observar en el algoritmo mostrado en la Figura 6.
La programación de este módulo se implementó en Python. Se inicia con la importación de librerías e inicio de la comunicación serial con la tarjeta de interfaz Arduino Mega, así como de la interfaz gráfica del prototipo, variables de control y temporizadores para la ejecución de multitareas. Luego se efectúan tres tareas simultáneas: la lectura del puerto serial con la información de los sensores provenientes de la tarjeta de interfaz, la verificación del modo de control del prototipo, y el accionamiento de botones de control. Finalmente, se realiza la publicación de información en la interfaz gráfica, así como en la plataforma IoT.
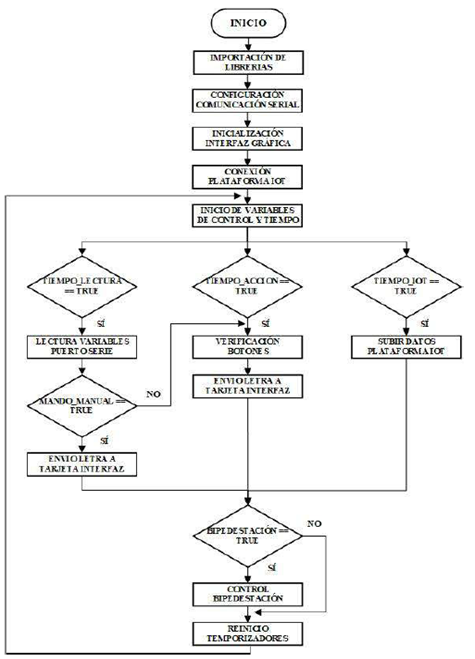
Figura 6. Algoritmo del módulo de procesamiento.
Elaboración: Los autores.
RESULTADOS
A. Validación del análisis estructural
Una vez conocidos los pesos reales de los componentes del prototipo se realiza la validación del análisis estructural. Cuando el prototipo se encuentra en estado de bipedestación (Resultado del estudio de tensión en Figura 7a) el estado de deformación muestra un valor máximo de 357 MPa, con un valor de 107 MPa en los apoya pies (cercano al valor del análisis inicial, 103 MPa). Este comportamiento, a partir del criterio de Von Mises para soportar cargas discretas (Cunha et al., 2024), valida el diseño al comportarse por debajo del límite elástico de 710 MPa.
El estudio de desplazamientos arroja resultados aceptables, sin diferencia significativa respecto al análisis inicial. En el prototipo se presenta una deformación máxima total de 1,26 mm, 0,37 mm en la placa y bases que soportan las baterías y de 0,50 mm en los tubos de los apoya pies al ser la estructura que soporta el mayor peso cuando la persona está en estado bipedestador (Figura 7b). Además, se validó la capacidad del prototipo para soportar de forma segura el peso conjunto del usuario y los componentes. Se alcanza un factor de seguridad mínimo de 1,98 en la mayor parte de la estructura, donde se encuentran elementos de unión en los que se dan los estados de esfuerzo críticos (Figura 7c).
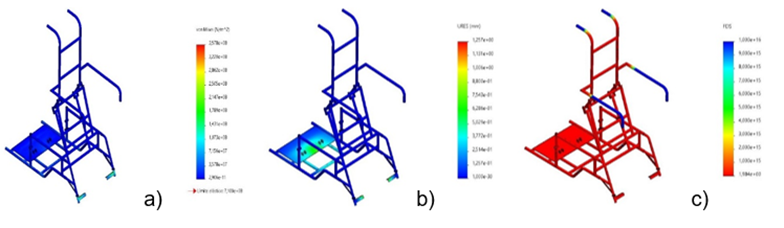
Figura 7. Resultados de la validación del análisis estructural.
Elaboración: Los autores.
B. Tiempo de desplazamiento del actuador lineal
Se calculó el ciclo de trabajo de bipedestación a partir de la realización de 10 pruebas. Se alcanzó un tiempo de subida y de bajada promedio de 19,54 s y 18,41 s, respectivamente, que arroja un tiempo de ciclo de trabajo de bipedestación de 37,95 s.
C. Recorrido del actuador lineal
De igual manera, se evaluó el recorrido del actuador lineal, tomando en cuenta la estabilidad de la silla mientras se desliza de arriba abajo o viceversa. En esta prueba se verifica si el actuador lineal logra recorrer los 20 cm que garantizan que la silla llegue a los ángulos de bipedestación. En las 10 pruebas realizadas se obtuvieron resultados satisfactorios, no se presentaron interrupciones en el recorrido, mostrando un movimiento estable y controlado, tanto en la subida como en la bajada.
D. Grados de bipedestación
También se midió el grado de alcance de los ángulos predefinidos en el diseño (163° y 169°) al momento en que la silla se encuentra en estado de bipedestación. En las pruebas se observó consistencia (sin variabilidad) en los ángulos durante la transición a la posición bípeda en el 100 % de las pruebas realizadas.
E. Consumo energético del prototipo
Se valoró el consumo energético del prototipo, el cual depende del nivel de activación de las cargas durante su funcionamiento. En la fase inicial del funcionamiento, se registra el menor consumo (0,1 A y potencia de 2,4 W); durante el encendido, el consumo es ligeramente superior (0,5 A y potencia de 12 W); en la bipedestación, el consumo con carga de hasta 70 kg alcanza un pico momentáneo (2,6 A y potencia de 62,40 W) que va disminuyendo hasta el completamiento del proceso; en la activación de los motores de las ruedas se tiene el mayor consumo (8,2 A con carga de 70 kg y potencia de 196,8 W).
A partir de los resultados anteriores, y considerando que, durante el funcionamiento normal del prototipo, los motores de las ruedas se encontrarán en continuo accionamiento, se considera el consumo máximo de operación el equivalente a 8,2 A. Teniendo en cuenta que la capacidad de la batería empleada es de 47 A/h, se estima un tiempo teórico de autonomía de aproximadamente 6 h.
F. Prueba de latencia en la plataforma IoT
Se midió el desempeño de la plataforma de IoT empleada (Ubidots) a partir del tiempo utilizado para la publicación de los datos emitidos por los sensores. Se tomó una muestra de 21 datos, durante un minuto (3 s como intervalo de actualización). Se constató que todos los datos fueron actualizados de manera correcta en el intervalo de tiempo estudiado.
DISCUSIÓN
Existen varios enfoques que abordan los modelos de sillas de ruedas con mecanismos de bipedestación. El prototipo expuesto en la investigación, desarrollado a partir de una silla estándar modificada mediante la incorporación de un sistema de bipedestación con monitoreo remoto mediante una plataforma IoT, ocupa una posición intermedia entre los enfoques que se destacan por su accesibilidad desde el punto de vista económico y aquellos que poseen tecnologías inteligentes integradas.
El prototipo propuesto, al integrar actuadores dimensionados, control electrónico y plataforma IoT, destaca sobre otros de su tipo como los presentados por Daniel Frederick et al. (2024), Sarda et al. (2021) y Shaikh-Mohammed et al. (2023). Estas propuestas buscan economía, mediante el empleo de dispositivos de bajo costo, simplicidad mecánica (operación manual), a través de resortes o sistemas de barras múltiples, y reducción de mantenimiento. La propuesta presentada en esta investigación sacrifica el factor económico a la vez que garantiza el elemento estructural y el funcionamiento autónomo.
Investigaciones como las de Cui et al. (2022), Kim et al. (2023), Rodríguez Austria & Rodríguez Ribón (2025) y Suman & Verma (2025) se centran en mecanismos de múltiples grados de libertad para lograr la rehabilitación neuromuscular, coincidiendo con el presente trabajo al buscar un funcionamiento biomecánico coherente. Estos, además, resaltan la tendencia actual hacia la integración de interfaces cerebro-computadora que garanticen movimientos más naturales y el control directo mediante señales neuronales.
Así, nuestra propuesta se ubica en un nivel intermedio: más avanzada que los diseños mecánicos tradicionales, pero menos disruptiva que los sistemas de neurocontrol vehicular o los modelos de interacción inteligente basados en aprendizaje profundo.
Dsouza et al. (2026) y Kim et al. (2023) desarrollan prototipos de sillas inteligentes basadas en IoT que integran monitoreo remoto, detección de obstáculos y alertas de seguridad. La presente propuesta coincide con estas investigaciones en la incorporación de sensores, conectividad en tiempo real y plataformas IoT para monitoreo de las condiciones operativas, pero presenta beneficios adicionales hacia la rehabilitación postural y la autonomía física como resultado de la incorporación de la funcionalidad de bipedestación. En general, los resultados que se obtienen validan la robustez estructural del diseño y lo sitúan en los márgenes aceptables según la literatura. Se confirma que de la integración de la movilidad motorizada, bipedestación y monitoreo remoto son una contribución diferenciada en el campo de las tecnologías asistidas. Se aporta un modelo que sirve de base para futuras investigaciones orientadas a la producción nacional y la reducción de dependencia tecnológica.
CONCLUSIONES
La revisión bibliográfica sobre los mecanismos y los sistemas que componen una silla bipedestadora permitió establecer los parámetros de diseño necesarios para acometer las modificaciones en una silla estándar, para que pueda realizar los movimientos requeridos y alcanzar la biomecánica de la bipedestación. Se alcanzaron los ángulos de 163° y 169° en la posición de bipedestador, valores característicos de estos equipos que permiten satisfacer las necesidades de movilidad de las personas.
El diseño CAD permitió tener una visión sobre la adaptación del mecanismo de bipedestación en una silla tradicional. El análisis estático realizado permitió corroborar que las nuevas adecuaciones no afectan la estructura inicial, se evidenció una deformación total máxima dentro de los límites en los tubos de apoya pies que representan un punto crítico al ser donde recae el peso de la persona cuando está en estado bipedestador. Además, el factor de seguridad mínimo alcanzado en la mayoría de la estructura evidencia la disponibilidad de un mecanismo funcional previo a la fase de manufactura del prototipo.
La adecuada selección de componentes permitió materializar un prototipo de silla de ruedas con mecanismo de bipedestación a partir de una silla estándar. El aprovechamiento de la totalidad de los componentes del modelo original evidencia un accionar sostenible y circular, al no generar desperdicios en el proceso de transformación hacia un nuevo producto. De esta forma, se logró el primer prototipo con dimensiones de 68 x 105 x 110 cm potenciadas con tecnología de control electrónico y monitoreo IoT y adecuado ergonómicamente para personas con una estatura promedio entre 140 a 160 cm y un peso máximo de 70 kg.
La plataforma IoT seleccionada para incorporar el monitoreo de funcionamiento del prototipo mostró un desempeño adecuado en cuanto a la latencia, registrando un 100 % de eficacia en el tiempo de publicación de los datos, aun cuando se realizaron adecuaciones en este tiempo debido a las restricciones propias de trabajar con una cuenta de prueba gratuita. Se obtuvo una valoración óptima del desempeño de la plataforma al ser amigable para el usuario y garantizar el registro y almacenamiento de los datos. Se recomienda la adquisición de un sistema de monitoreo mediante un plan anual en la plataforma IoT o el desarrollo de un propio.
El prototipo mostró un despliegue adecuado durante las pruebas de funcionamiento, tanto con carga como sin ella, alcanzando ángulos de 163° y 169°, propios de la biomecánica de bipedestación. Estos resultados se atribuyen al correcto recorrido del actuador, diseñado para 20 cm. Se observaron oscilaciones mínimas en los tiempos de subida y bajada, y en consecuencia en el ciclo de trabajo de bipedestación, acorde a la variación del peso de la persona, validando su funcionamiento con pruebas reales.
FINANCIAMIENTO
No monetario.
AGRADECIMIENTO
El artículo es resultado del “Proyecto de Inclusión y Apoyo Interinstitucional para Mejorar la Calidad de Vida de Personas con Discapacidad Motora y con Cuidados Paliativos”, ejecutado por la Escuela Superior Politécnica de Chimborazo, a través de la Facultad de Mecánica y el grupo de investigación AUTOPRO.
REFERENCIAS CONSULTADAS
CONADIS (2022). Estadísticas de Discapacidad. 2022. https://n9.cl/r0f9
Cui, J., Cui, L., Huang, Z., Li, X., & Han, F. (2022). IoT Wheelchair Control System Based on Multi-Mode Sensing and Human-Machine Interaction. Micromachines, 13(7), 1108. https://doi.org/10.3390/mi13071108
Cunha, A., Yanik, Y., Olivieri, C., & da Silva, S. (2024). Tresca Versus Von Mises: Which Failure Criterion is More Conservative in a Probabilistic Context? ASME, Journal of Applied Mechanics, 91(11), 111008. https://doi.org/10.1115/1.4063894
Daniel Frederick, S., Shaikh-Mohammed, J., Suresh, G., & Sujatha, S. (2024). Long-term community integration study of an affordable manual standing wheelchair. Disability and Rehabilitation: Assistive Technology, 19(7), 2698–2707. https://doi.org/10.1080/17483107.2024.2313083
Daniel, S., Rawat, N., Iyer, R., Shaikh-Mohammed, J., Dash, S. S., Sarda, V., & Sujatha, S. (2022). User experience study of an affordable manual standing wheelchair. Disability and Rehabilitation: Assistive Technology, 18(8), 1536–1543. https://doi.org/10.1080/17483107.2022.2060350
Dsouza, L. W., Kamble, S. S., Nevade, N. V., & Kamble, P. S. (2026). IoT-based smart wheelchair for assisted mobility and safety monitoring. International Journal of Contemporary Research in Multidisciplinary, 5(1), 474-477. https://doi.org/10.5281/zenodo.18497779
Field, D. A., Borisoff, J., Chan, F. H. N., Livingstone, R. W., & Miller, W. C. (2025). Standing behaviour of non-ambulant children and youth using powered wheelchair standing devices (PWSDs): an interrupted time series pilot study. Disability and Rehabilitation: Assistive Technology, 20(8), 3236–3253. https://doi.org/10.1080/17483107.2025.2529509
Gohlke, J. H., & Kenyon, L. K. (2024). Exploring powered wheelchair standing device use in children and adults: a longitudinal case series. Disability and Rehabilitation: Assistive Technology, 19(3), 699–711. https://doi.org/10.1080/17483107.2022.2120101
Jasso, V, Torres, FJ, Martínez, I, Núñez, DA, & Hernández, M. (2023). Design of a mechanism to assist the standing up and sitting down of a wheelchair user. Proceedings of the 2023 Design of Medical Devices Conference. 2023 Design of Medical Devices Conference. https://doi.org/10.1115/DMD2023-9263
Kenyon, L. K., Aldrich, N. J., Behl, S. L., Bazany, S. G., McDonagh, E. R., & Miller, W. C. (2024). Enabled to Stand: A Single-subject Research Design Study Exploring Pediatric Power Wheelchair Standing Device Use. Pediatric Physical Therapy 36(3), 316-327. https://doi.org/10.1097/PEP.0000000000001110
Kim, Y., Velamala, B., Choi, Y., Kim, Y., Kim, H., Kulkarni, N., & Lee, E.-J. (2023). A literature review on the smart wheelchair systems. Electrical Engineering and Systems Science, 01285. https://doi.org/10.48550/arXiv.2312.01285
Lima, P. R. S., Albuquerque, J. P. M., Rodrigues, A. B. M., Lima, D. L., & Vasques, K. B. P. P. (2023). Internet of things e indústria 4.0: revisão sistemática bibliométrica. Revista Contemporânea, 3(5), 4424–4436. https://doi.org/10.56083/RCV3N5-052
Luis García, L. C., & Torres Gómez, A. R. (2024). Desarrollo de aplicaciones IoT: metodologías y estrategias. European Public & Social Innovation Review, 9, 1–18. https://doi.org/10.31637/epsir-2024-1375
Medina Otalvaro, C. M., Blandón Andrade, J. C., Zapata Jaramillo, C. M. & RiosPatiño, J. I. (2022). IoT Best Practices and their components: A Systematic Literature Review. IEEE Latin America Transactions, 20(10), 2217-2228. https://doi.org/10.1109/TLA.2022.9885169
Merai, S., Shah, D., Trivedi, B., Joshi, P., & Kushwah, S. (2022). A study and design of standing wheelchair. International Conference on Materials and Sustainable Manufacturing Technology (Materialstoday 2022), 65(8), 3787-3792. https://doi.org/10.1016/j.matpr.2022.06.485
Örücü Atar, M., Köroğlu, Ö., Çetinkaya Gezer, İ., Özcan, F., Şamlı, F., & Yılmaz, B. (2025). The use of standing powered wheelchairs from the perspective of individuals with spinal cord injury. Disability and Rehabilitation: Assistive Technology, 20(1), 184-188. https://doi.org/10.1080/17483107.2024.2359489
Rodríguez Arias, H. A. & Rodríguez Ribón, J. C. (2025). Tecnologías pasivas y personalizadas de bipedestación: análisis bibliométrico de su desarrollo global en busca de aportes desde América Latina. Revista Colombiana de Tecnologías de Avanzada, 2(46), 22–31. https://doi.org/10.24054/rcta.v2i46.3783
Sarda, V., Dash, S. S., Mohan Varma, D. S., Shaikh-Mohammed, J., & Sujatha, S. (2021). Design of a low-cost, reconfigurable, standing wheelchair with easy and stable sit-stand-sit transition capability. Disability and Rehabilitation: Assistive Technology, 18(7), 1056–1065. https://doi.org/10.1080/17483107.2021.1978564
Shaikh-Mohammed, J., Dash, S. S., Sarda, V., & Sujatha, S. (2023). Design journey of an affordable manual standing wheelchair. Disability and Rehabilitation: Assistive Technology, 18(5), 553–563. https://doi.org/10.1080/17483107.2021.1892839
Suman, S. K., & Verma, K. (2025). A novel mechanism to support the sit-to-stand and squat-to-stand physical training for rehabilitation purposes. Discover Applied Sciences, 7, 351. https://doi.org/10.1007/s42452-025-06749-0
Taoheed, F., Parvez, S., Rahman, M. A., Hossain, M., Hossain, M. A., Haque, O., Taylor, V. A., Hossain M. S., & Alam, M. (2025). Feasibility, usability, and acceptability of a novel open-source low-cost manual standing wheelchair in low economic settings. Disability and Rehabilitation: Assistive Technology, 1–11. https://doi.org/10.1080/17483107.2025.2591868
©2026 por los autores. Este artículo es de acceso abierto y distribuido según los términos y condiciones de la licencia Creative Commons Atribución-NoComercial-CompartirIgual 4.0 Internacional (CC BY-NC-SA 4.0) (https://creativecommons.org/licenses/by-nc-sa/4.0/).